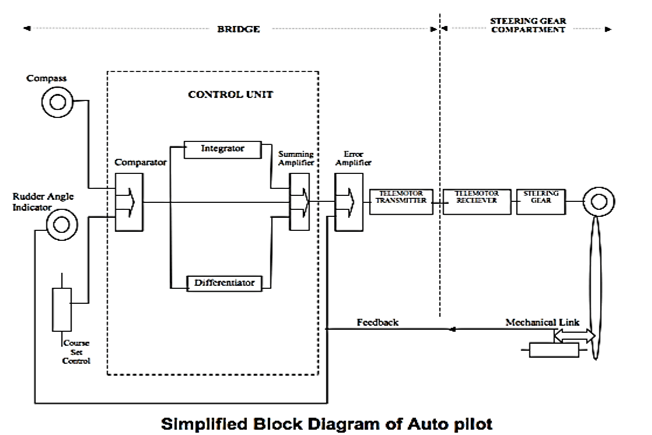
Autopilot is the ship‟s steering controller which automatically manipulates the rudder to decrease the error between the reference heading and actual heading.
Autopilot relieves the helmsman to great extent but definitely autopilot is not a substitute for helmsman.
Autopilot also reduces fuel consumption as the zig-zag course is avoided.
PID Control:
Proportional, Integral and Derivative steering control system, the oscillation is minimized by modifying the error signal produced as the difference between the selected heading and the compass heading.
PROPORTIONAL CONTROL
The effect on steering when only proportional control is applied causes the rudder to move by an amount proportional to the off-course error from the course to steer and the ship will oscillate on either side of the required course-line.
DERIVATIVE CONTROL
The rudder is shifted by an amount proportional to the rate of change of ship’s deviation from the course. The ship will make good a course which is parallel to the required course and will continue to do so until the autopilot is again caused to operate by external force acting on the ship.
INTEGRAL CONTROL
There are certain errors due to design parameters of the vessel which have to be corrected. Data signals are produced by continuously sensing heading error over a period of time and applying an appropriate degree of permanent helm is used for this purpose. The permanent helm acts as mid-ship.
What are settings of Autopilot system?
• Permanent helm:
To be used only if a constant influence, like cross wind or beam sea is experienced. If there is a very strong beam wind from starboard side then a permanent 5 degrees starboard helm may be set.
• Rudder:
This setting determines the rudder to be given for each degree of course drifted. Eg. 2 degrees for every 1 degree off course.
• Counter rudder:
Determines the amount of counter rudder to be given once v/l has started swinging towards correct course to stop swing. Both rudder & counter rudder to be set after considering condition of v/l (ballast, loaded, etc.). Eg. Laden condition full ahead, not advisable to go over 10 degrees rudder.
• Weather:
To be used only if a constant influence, like cross wind or beam sea is experienced. If there is a very strong beam wind from starboard side then a permanent 5 degrees starboard helm may be set.
• Rudder:
This setting determines the rudder to be given for each degree of course drifted. Eg. 2 degrees for every 1 degree off course.
• Counter rudder:
Determines the amount of counter rudder to be given once v/l has started swinging towards correct course to stop swing. Both rudder & counter rudder to be set after considering condition of v/l (ballast, loaded, etc.). Eg. Laden condition full ahead, not advisable to go over 10 degrees rudder.
• Weather:
The effect of weather & sea conditions effectively counteracted by use of this control. This setting increases the dead band width. Comes in handy if vessel is yawing excessively.
What are different Steering modes of Auto Pilot?
Auto/Manual, Follow up, Non Follow up
What is Off course alarm?
• It is fitted on the autopilot usually set for 5 or 10 degrees. If difference between actual course & course set by officer for autopilot is more than value set for alarm, it will sound.
• This alarm will not sound in case of gyro failure.
• Only indication in this case is a gyro failure alarm. Gyro compass & repeaters to compared frequently along with magnetic compass.
What are disadvantages of Autopilot?
• The auto pilot gives rudder according to the gyro heading.
• If the gyro fails the autopilot will still keep the gyro course & wander with the gyro.
• Gyro alarm to be taken seriously or the v/l will collide if there are sudden alterations.
Settings which depend upon ships loading conditions:
Rudder Setting
Determines the rudder to be given for each degree course drift. e.g. 2° degrees rudder for every 1°off course.
Counter rudder
Determines the amount of counter rudder to be given to stop swing as the ship approaches the correct course,
Maximum Rudder
Determines the maximum rudder angel that can be set. For example, In full load is advisable not to give more than 10° rudder.
Permanent Helm
Use only when a ship tends to veer off towards one side of the course due to strong cross wind or a beam sea.
Weather
The effect of weather & sea conditions which causes ship to yaw excessively, can be counteracted by use of this control.
Off Course Alarm
Higher setting in open sea and smaller setting in restricted waters.
Caution: This alarm will not sound in case of gyro failure. Only indication in this case is a gyro failure alarm.
Solution: Frequent comparison of Gyro and Magnetic Compass.
What is AUTO ADAPTIVE STEERING SYSTEM
This is an advanced version of the PID control which adapts to the steering capabilities of the ship as well as the wind and weather conditions.
The ship’s hull dynamic characteristics keep changing with the change in the load condition, speed, depth of water, wind and weather conditions etc. In the PID autopilot, the controls have to be re-adjusted to get the optimum steering but in the adaptive autopilot, the estimation algorithm is incorporated so that the optimum steering is obtained without re-adjusting the controls.
Processing Unit in the ADAPTIVE mode and the control algorithm is divided into three units as follows:-
• Estimation Unit
• Optimal Control Unit and
• Adaptive Kalman Filter
The ship should not be on autopilot mode under the following situations:
In narrow channels
At slow speeds
In areas of heavy traffic
In rough weather conditions
When vessel is under pilotage
In poor visibility
The autopilot should not be used for following:
For large alteration of course (unless the autopilot is designed for the purpose)
Never for collision avoidance











No comments:
Post a Comment